三轴陀螺仪三轴加速度计MPU6050
作者:nieyong
陀螺仪
陀螺仪,测量角速度,具有高动态特性,但是它是一个间接测量角度的器件,它测量的是角度的导数,角速度,要将角速度对时间积分才能得到角度。
如果这个世界是理想的,美好的,那我们的问题到此就解决了,不过很遗憾,现实是残酷的,误差的引入,使得积分出现了问题。
假设陀螺仪固定不动,理想角速度值是0dps(degree per second),但是有一个偏置0.1dps加在上面,于是测量出来是0.1dps,积分一秒之后,得到的角度是0.1度,1分钟之后是6度,还能忍受,一小时之后是360度,转了一圈,也就是说,陀螺仪在短时间内有很大的参考价值。
陀螺仪就是内部有一个陀螺,它的轴由于陀螺效应始终与初始方向平行,这样就可以通过与初始方向的偏差计算出实际方向。传感器MPU6050实际上是一个结构非常精密的芯片,内部包含超微小的陀螺。陀螺仪运转一段时间以后,noise和offset会导致数据偏差,需要借助其它传感器进行较正。
使用陀螺仪获得角度,一定要考虑积分误差的问题。
加速度计
加速度计可以测量加速度,包括重力加速度,于是在静止或匀速运动的时候,加速度计仅仅测量的是重力加速度,而重力加速度与刚才所说的R坐标系是固连的,通过这种关系,可以得到加速度计所在平面 与 地面 的角度关系.
但是加速度计若是绕着重力加速度的轴转动,则测量值不会改变,也就是说无法感知这种水平旋转。
关于MPU6050
MPU-60x0是全球首例9轴运动处理传感器。它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP(Digital Motion Processor),可用I2C接口连接一个第三方的数字传感器,比如磁力计。扩展之后就可以通过其I2C或SPI接口输出一个9轴的信号(SPI接口仅在MPU-6000可用)。MPU-60x0也可以通过其I2C接口连接非惯性的数字传感器,比如压力传感器。
MPU-60x0对陀螺仪和加速度计分别用了三个16位的ADC,将其测量的模拟量转化为可输出的数字量。为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,陀螺仪可测范围为±250,±500,±1000,±2000°/秒(dps),加速度计可测范围为±2,±4,±8,±16g。一个片上1024 字节的FIFO,有助于降低系统功耗。和所有设备寄存器之间的通信采用400kHz的I2C接口或1MHz 的SPI接口(SPI仅MPU-6000可用)。对于需要高速传输的应用,对寄存器的读取和中断可用20MHz的SPI。另外,片上还内嵌了一个温度传感器和在工作环境下仅有±1%变动的振荡器。
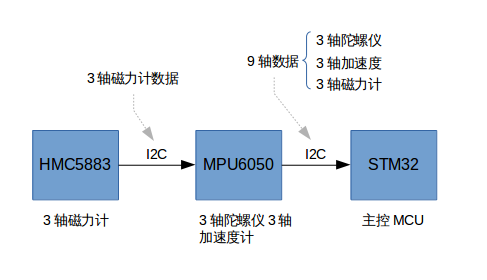
在crazepony上,MPU6050,HMC5883传感器之间的连接如下图所示。
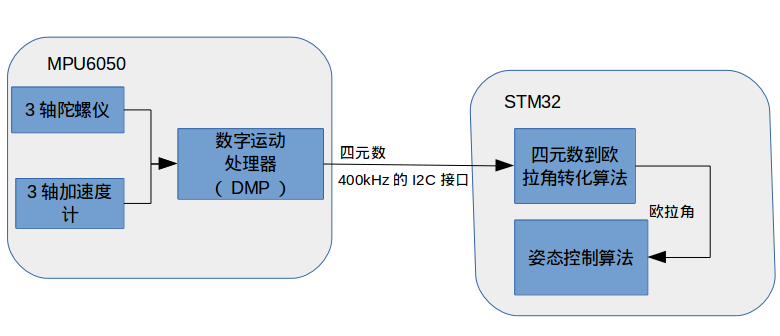
MPU6050中DMP应用
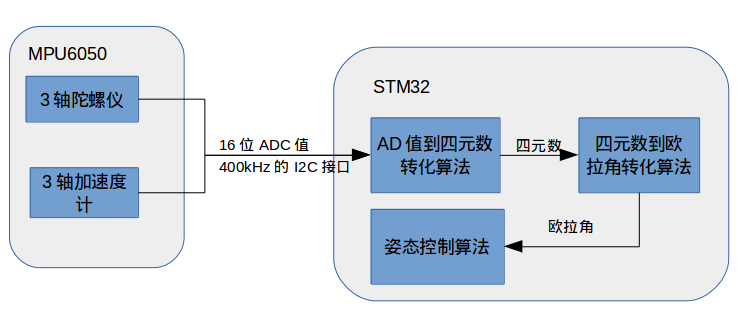
在Crazepony-II上,测试了软件解算四元素,然后通过四元素解算姿态角这种实现方式,其实总的来说,并没感觉36MHz的主控压力有多大,没有出现机身不稳,卡死的情况。
同时,本着务实他的态度,我们也测试了MPU6050的硬解四元素,即从IIC总线上读到的数据不再是MPU60x0的AD值,而是通过初始化对DMP引擎的配置,从IIC总线上读到的直接就是四元素的值,从而跳过了程序通过AD值计算四元素这个看起来繁琐的步骤。测试结果是,机身反应的确要比之前反应灵活,最关键的一点是,这样得出的偏航角(Yaw)很稳很稳,基本不会漂移或者说漂移小到了可以容忍的地步。
最后,MPU60x0的强大之处不仅于此,它支持一个从IIC接口,可以外部接上一个磁力计,如HMC5883,这样一来,DMP引擎可以直接输出一个绝对的方向姿态,即能够输出一个带东西南北的姿态数据包,很厉害的样子。在Crazepony-II第四版将会加上这样一个磁力计,相信它再也不会迷路了~~