本教程适合Crazepony-II 5.0版本
整机物料列表
- Crazepony四轴飞行器,电机已经安装(1个)
- 正反桨叶(各2只)
- Crazepony遥控器,摇杆已经安装(1个)
- 摇杆帽(2个)
- 遥控器用2.4G无线模块(1个)
- Micro USB数据线(1根)
桨叶安装
四轴飞行器的桨叶分为两种,正桨和反桨。安装的时候不能够搞混淆。桨叶上标示有R的安装到M2,M4两个机臂的电机上。标示有L桨叶安装到M1,M3两个机臂电机上。


遥控器安装
你拿到Crazepony的包裹的时候,需要自行安装遥控器摇杆帽,没有左右之分。
将2.4G模块安装到遥控器上的排针插座上。模块方向向外。
对频解锁试飞
将飞机平放到地面上,电源开关拨到ON,白色电源LED亮起,4个蓝色LED开始闪烁。飞机进入接收遥控器信号状态。
打开遥控电源,左上角的白色power灯亮起,左上角信号灯开始间断闪烁,右上角一排蓝色LED常亮后,代表遥控正在工作。
如果对频成功,飞机的四个LED依次旋转两周,最后会变暗,进入等待解锁状态。
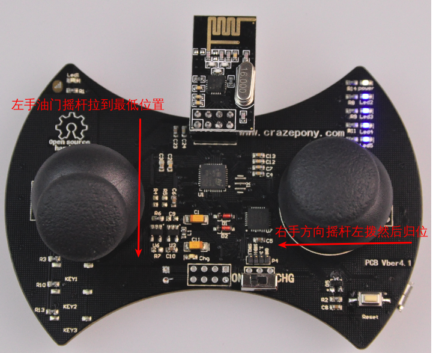
将左手油门摇杆拉到最低位置,右手方向摇杆打到最左位置然后松手复位,此为解锁手势。
解锁成功后,只有M1和M2臂上的LED开始间断闪烁,crazepony默认是“X”型模式,所以,闪灯的两个臂作为机尾,应该正对遥控者。如果未接电池,直接使用usb给飞控电路板供电,则会出现四个LED齐闪烁的现象。
将左手油门摇杆左右反复拨到底几次,让飞控学习到航向角摇杆的操作。否则会出现航向角无法锁死的问题,即飞起之后四轴飞行器绕中心旋转,即航向角漂移。
这时候慢慢往上推左手油门遥杆,电机将会开始转动。初次试飞,一定要到宽阔的户外草地感受摇杆的力度和飞机的灵敏性。不要到室内测试。或者选择用手拿住飞机,拨动摇杆,感受摇杆各个控制量对飞机姿态的影响
遥控器的微调
对于无法垂直起飞的问题,遥控器已经实现了微调功能。定义为遥控器上Key2用于切换是调节横滚(roll)还是俯仰(pitch),Key3表示偏移值增加,Key4表示偏移值减小。这些调节的偏移值会默认被写入STM32的Flash中保存,下次开机之后自动读取。
飞机起飞向左右偏,需要调节横滚:
按Key2按键,当LED2亮起的时候,表示可以调节横滚。Key2表示增加,相当于方向摇杆向左打,适合飞机向右偏的情况;Key3表示减小,相当于方向摇杆向右打,适合于飞机向左偏的情况。
飞机起飞向前后偏,需要调节俯仰:
按Key2按键,当LED2灭掉的时候,表示进入调节俯仰。Key2表示增加,相当于方向摇杆向前打,适合飞机向后偏的情况;Key3表示减小,相当于方向摇杆向后打,适合于飞机向前偏的情况。
该功能代码已经上传github,还有些不够完善的地方,欢迎测试。
电量检测和充电
飞机的四个机臂LED同时出现快速闪烁,则表示飞机电池需要充电。将飞机开关拨到Charge位置,连上usb线则可以充电。可以使用电脑,充电宝,手机充电器等为飞机进行充电。
充电时红色LED亮起,灭掉的时候则表示充电完成。
常见问题
##Crazepony的遥控是属于美国手还是日本手?
答:美国手。也就是说左手摇杆负责油门和偏航,右手摇杆负责俯仰和横滚。左手摇杆上下为油门控制,左右是偏航控制;右手摇杆上下为俯仰控制,左右为横滚控制
有必要科普下什么是日本手:左手摇杆负责俯仰和偏航,右手摇杆负责油门和横滚。是不是很别扭?将俯仰和横滚的控制分离开这种设计太反人类了个人觉得,但是它就是这样一个标准没办法,日本人通常都会做些我们难以理解的事大家都知道的。
为什么Crazepony的电机臀部老是被戳穿?(有人会在这个时候开始一个劲儿乱喷骂娘,我也很无奈)
答:这么说吧,正常情况下100次起落,都不会对飞机造成任何物理结构上不可逆的毁坏。那么,电机臀部被戳穿这种事情,属于飞机脸先着地的意外,他的臀部是被那根轴顶穿的,空心杯电机其实很脆弱,这个我没办法控制,我已经尽力了。我看了国内的那些用空心杯电机的小四轴,好像都有这个问题…所以,大家提高飞行技术,是对Crazepony最直接的保护。当然,电机坏了,这种事情太好处理了,多准备些空心杯电机,只要主板没坏,随便怎么折腾都可以…
无法垂直起飞的问题
答:小伙伴在拿到四轴飞行器试飞的时候,遇到无法垂直起飞的问题,可以从下面4个方面循序渐进,依次改进。
- 电机是否装正了,是否有偏的问题,或者电机轴位置被缠住了(一般是头发,我们就遇到)。
- 整个四轴的重心问题,主要是由于电池位置。你可以根据情况稍稍移动电池位置,改变其重心。
- 通过上面办法要做到完全的垂直起飞还是比较难。但是你可以再起飞的时候稍稍带一点方向遥杆,体验飞行应该是没有问题。我们基本上是做到这一步。
- 进一步的调试方法,那就是遥杆的归中值。也就是说,微调遥杆中间值。有一个上海的伙伴已经这样做了,并且和我们进行了沟通,他在飞控固件中对遥感数据的接收,加入了一个校正偏移量。另外一个方法就是到遥控器上修改,其实很多玩具四轴就是这样做的。就是在遥控器上有4个小按键,用于微调遥感归中值。在我们crazepony遥控器的左下角有几个按键没有焊接,那就可以预留这个作用的。
