##CC3D配置向导 作为一个之前对CC3D没有接触的新手,我们应该怎样快速入门CC3D让H250飞起来呢?OpenPilot CC3D拥有一个非常详尽的上位机,下面提供了百度云和官网下载的链接,读者可自行下载,14.01版本界面语言为English,当然地面站有汉化版,下面以版本为14.01为例介绍CC3D向导配置过程。
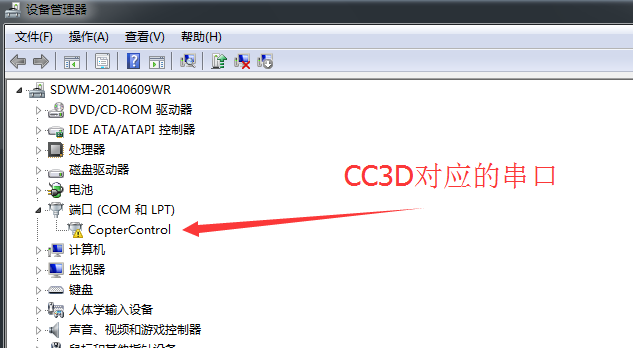
##地面站的安装 点击CC3D上位机安装程序OpenPilot-RELEASE-14.01-win32.exe,默认安装,一路next即可。安装最后窗口弹出提示安装驱动,点击确认安装即可。安装驱动程序之后用数据线将CC3D与电脑连接,有可能你的电脑会提示该驱动安装未成功,在设备管理器里COM端口有出现但是Copter Control黄色感叹号标识,如下图所示。这个时候,其实上位机和CC3D飞控已经可以正常通信。
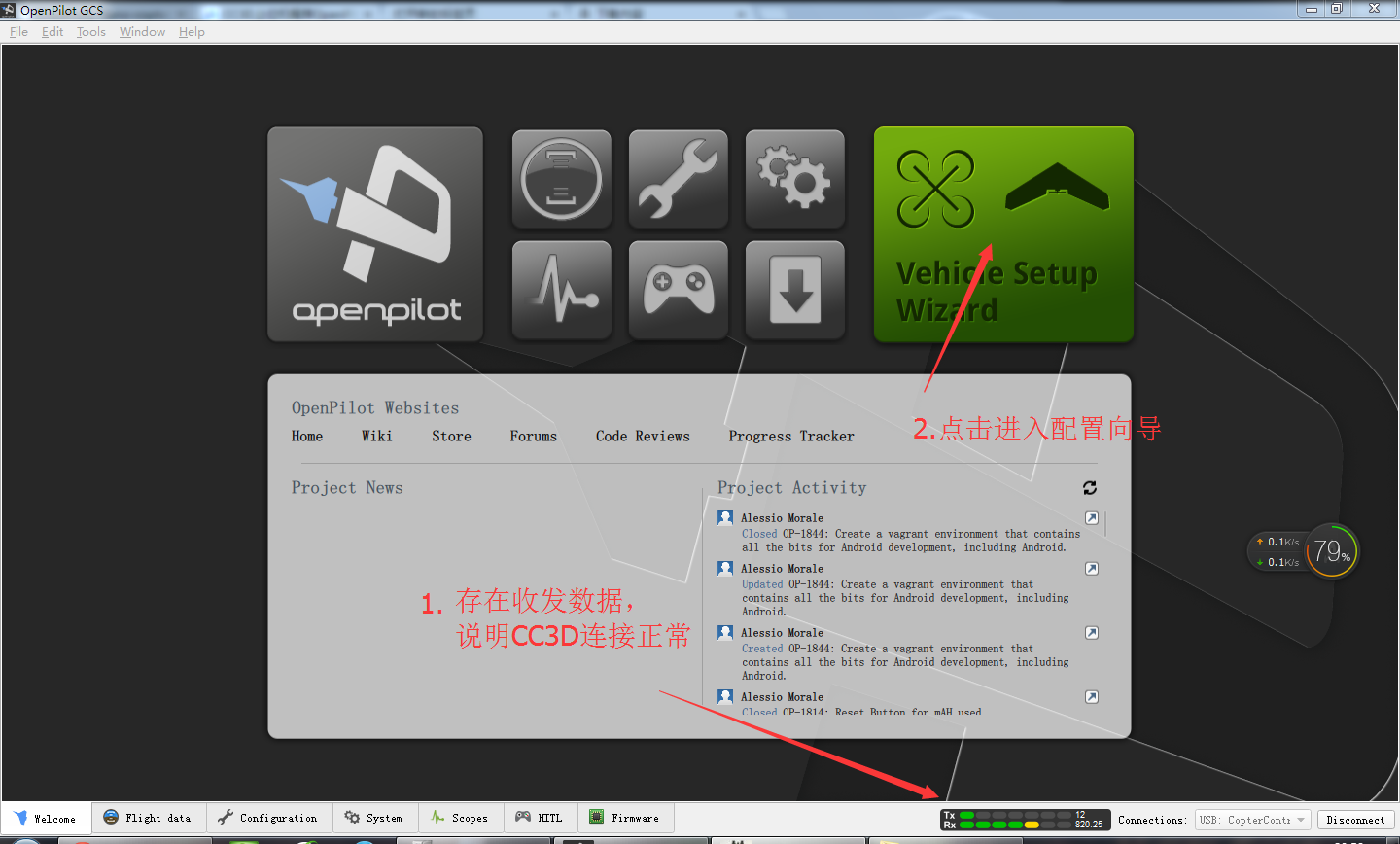
##CC3D向导配置 进入地面站,首先查看端口通信是否连接,点击Vehicle Setup Wizard进入向导配置界面如图所示。
CC3D飞控使用mini USB接口和上位机相连。
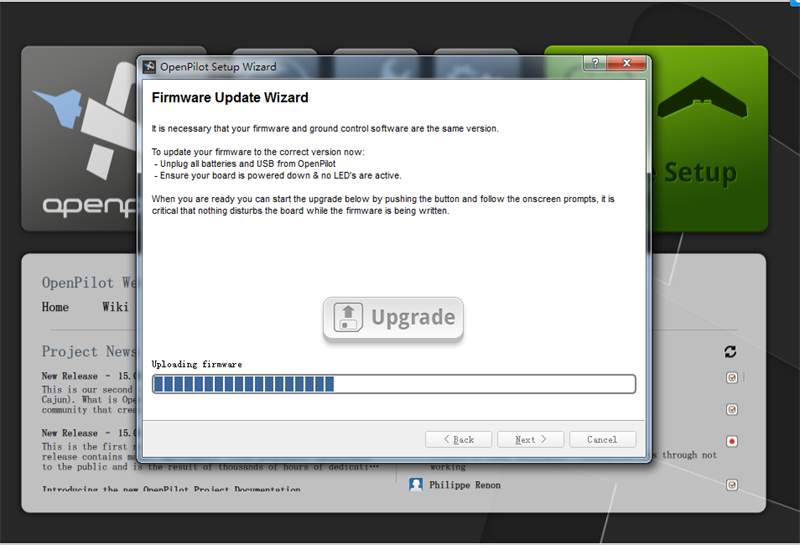
进入设置向导后,会出现红色标识,上位机非常人性的提示在配置之前卸掉桨叶,以防意外发生。next进入下一界面,固件升级界面,提示你需要将固件版本与地面站版本保持一致,初次配置,建议Upgrade升级固件。升级固件步骤:
- 断开航模电池,拔掉USB线,保证CC3D飞控已经完全断电,没有LED亮起
- 点击Upgrade按钮
- 根据进度条上的提示,待进度条走动时迅速插上USB数据线,地面站将自动写入最新固件。
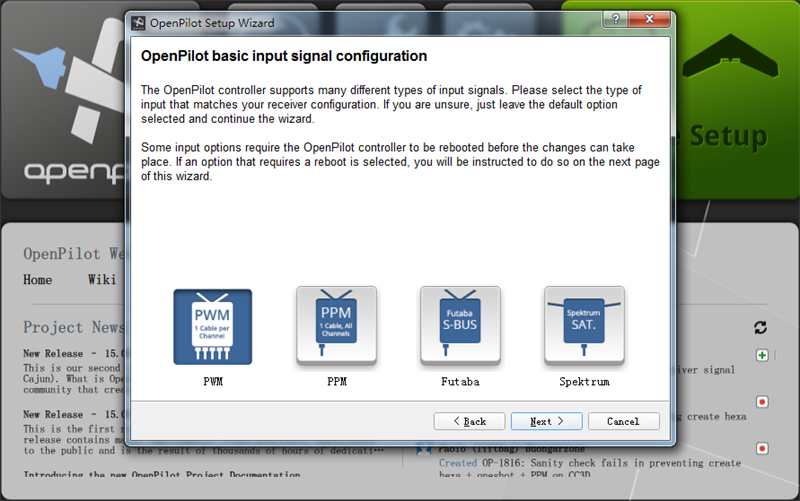
飞控写入最新固件后,next进入遥控接收器的配置,有PWM/PPM/Futaba/Spektrum四种可选。我们使用的是FS-T6遥控套件,选择PWM通信方式。至于这4中遥控接收器的特点和区别,可以参考todo。
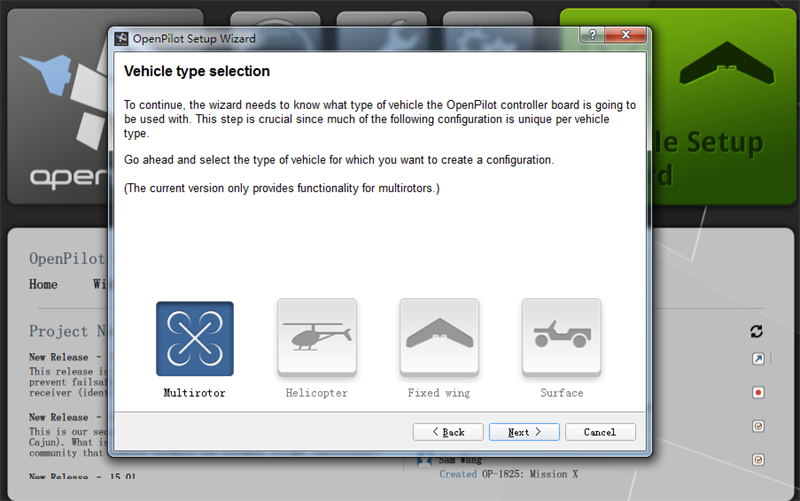
next下一步将会提示选择飞机的类型,有Multirotor、直升机、固定翼及车类选项,目前14.01版本只支持Multirotor和固定翼,选择Multirotor。
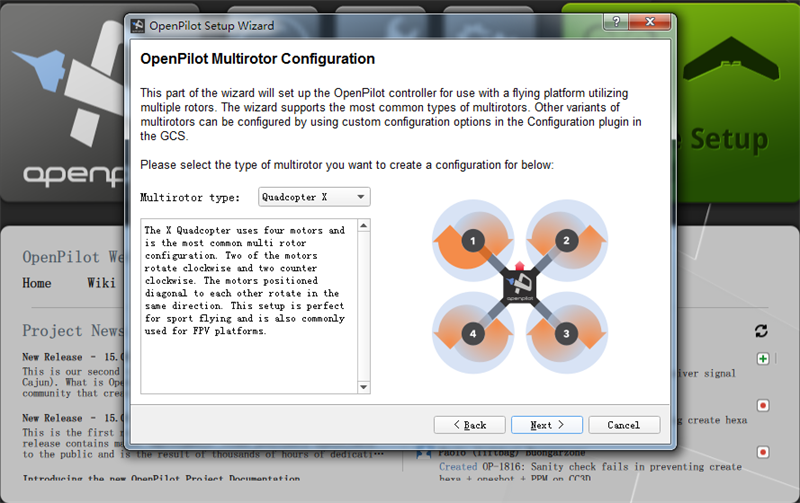
下一步将要选择多轴飞行器的机型,Multirotor type下拉框有三轴、四轴、六轴及各种飞行模式可选,右边窗口将会有示意图示意所选择的类型及各个电机转动的方向。选择四轴飞行器,X模式,即Quadcopter X。
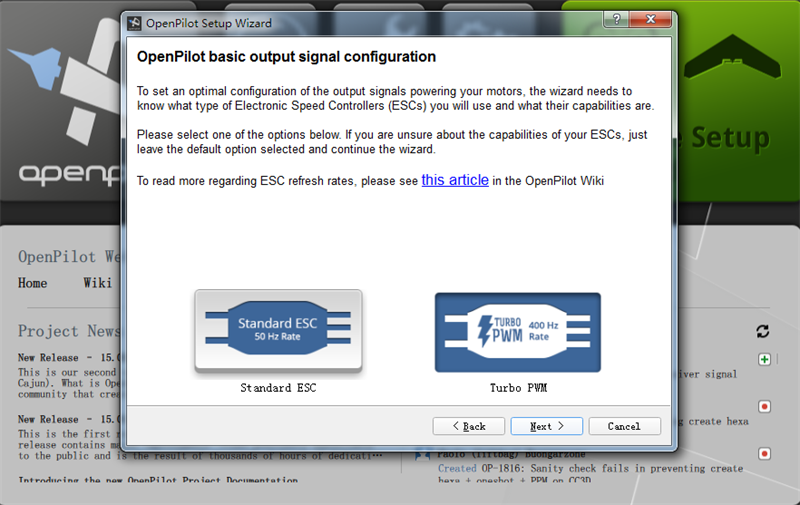
next下一项进入电调的选择界面,有高速电调和标准电调两项可选,选择对应电调同时还要告知工作信号的类型,H250选择高速电调;
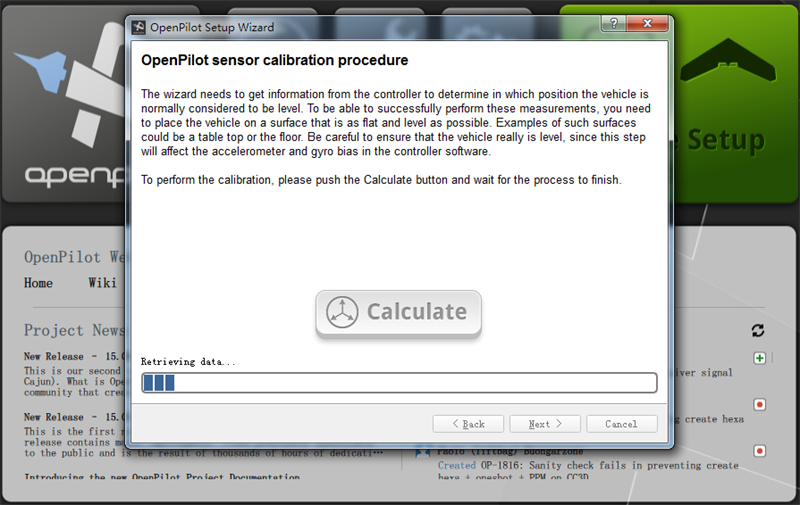
上位机将会把刚刚所配置的信息显示,确认next,进入传感器校准程序界面。在进入传感器校准之前,需要将飞控板保持水平状态,避免误差。
硬件配置总结:关于配置这块,如果担心记不清楚选项或者初次接触不知如何入设置,我们就按默认选项即可,CC3D的默认选项与H250完全一致。
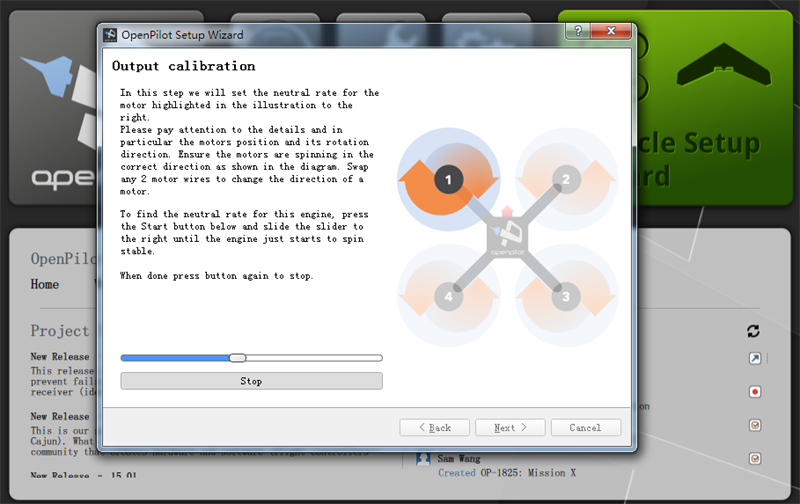
电机输出校准
校准传感器Next进入电机输出校准界面。在这里提醒大家卸掉桨叶接通电源!输出校准是设置电机的中性环境。方法是点击Start,鼠标拖动滑块向右移动直到电机转动,然后点击Stop,待电机完全停下,点击开始,观察点击能否自己启动,左右移动滑块调节电机启动的临界点。这里需要注意电机的位置及电机的旋转方向,若电机位置不一致,匹配飞控输出通道与电机所对应电调;若旋转方向不一致,只需将电机的任意两根线互换即可。
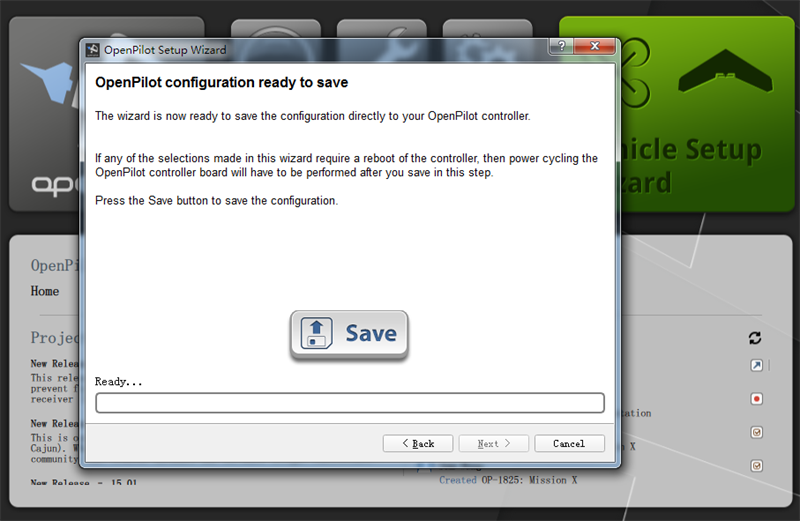
电机2、3、4的输出校准同电机1一样,按照电机1的设置步骤即可。四个电机参数设定之后,next进入参数写入界面,点击save。
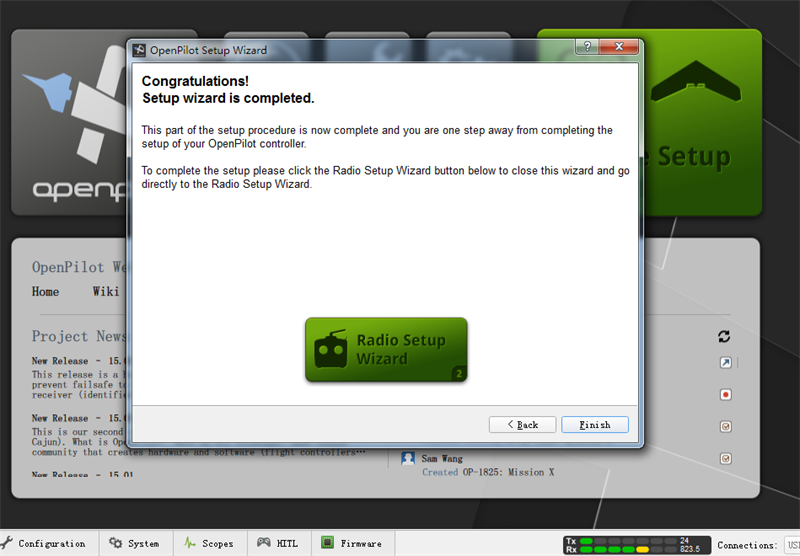
遥控器配置
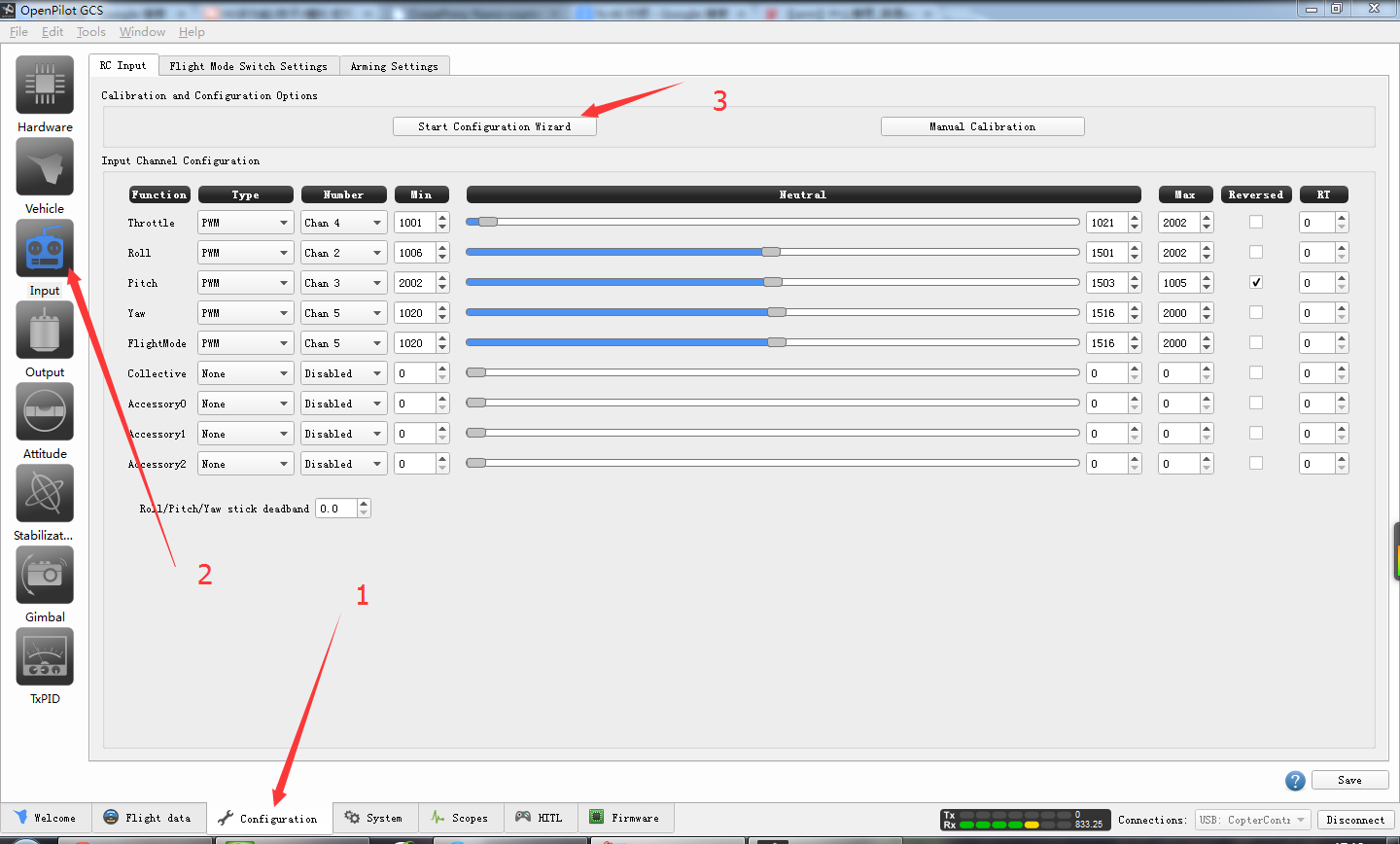
CC3D的地面站在配置遥控时默认把油门解锁关闭,笔者建议配置遥控参数先检查油门有没有锁定,以防配置过程中忘记卸掉电池造成不必要的伤害。承接上面的配置过程,点击Radio Setup Wizard直接进入遥控配置界面。也可以点击Finish退出,从Configuration->Input->Start Configuration Wizard进入配置界面。如下图所示。
进入遥控配置向导后,操作将会提示按照屏幕上的指示去操控遥控杆,任意时刻都可以取消或者返回上一步。将接收器和CC3D连接正确,CC3D使用电池供电,开启遥控器电源。看到接收器FS-R6B上红色的LED亮起,则表示遥控器和接收器连接(对频)成功,可以进行后面的操作。如果LED未亮起,可以从下面几点检查:
- 接收器和CC3D连接是否正确。注意连接线的正反和顺序。
- CC3D电源供电是否开启。测试发现,只使用USB给CC3D供电是无法满足接收器的供电的。
- 接收器和遥控器是否需要对频。有关对频问题,参考todo。
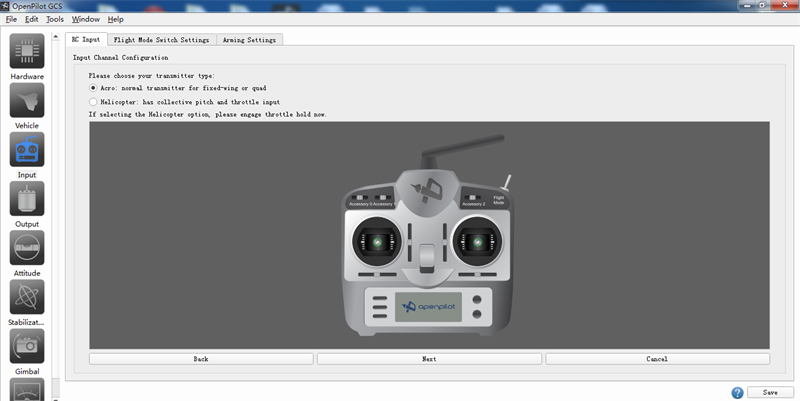
Next,进入遥控器发射机类型选择,acro类型或者直升机类型。acro类型适用于固定翼或四轴,我们选择acro类型。
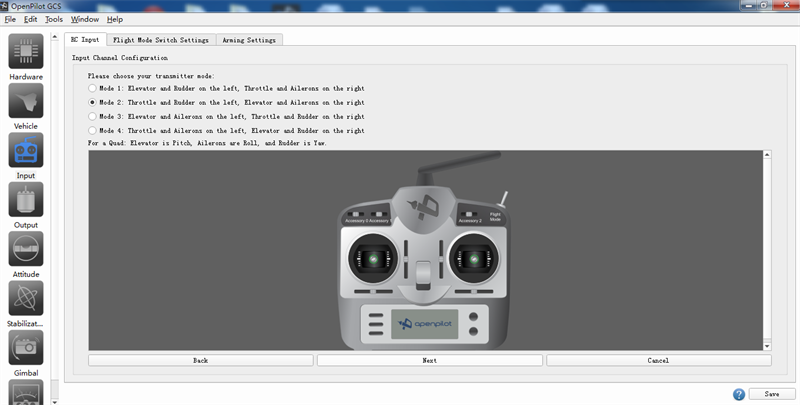
Next,进入遥控器操作模式选择,也就是常说的美国手或者日本手选择。提供4种模式,根据个人习惯去选择,笔者选择默认模式美国手,即Mode 2。油门和方向在左,俯仰和横滚在右。
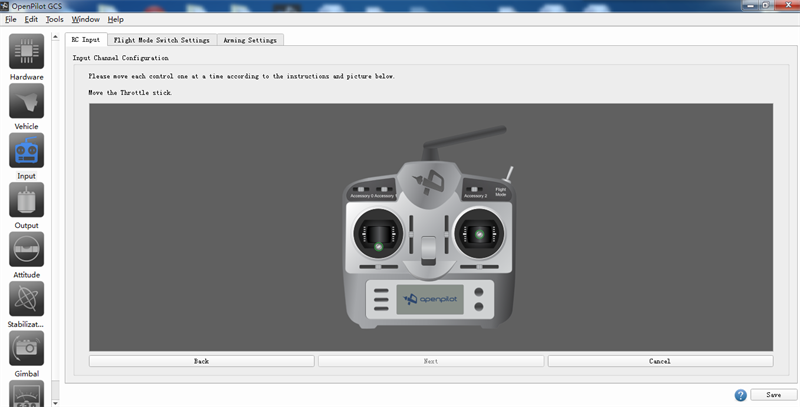
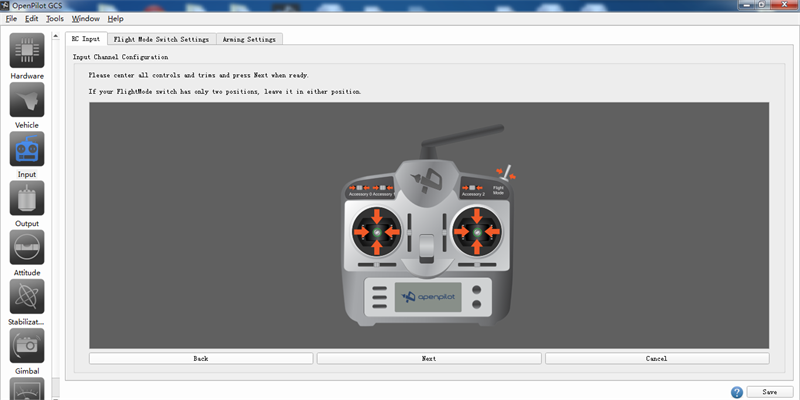
Next,根据屏幕指示去操作遥控器,分别对油门、横滚、俯仰、方向即模式进行校准。
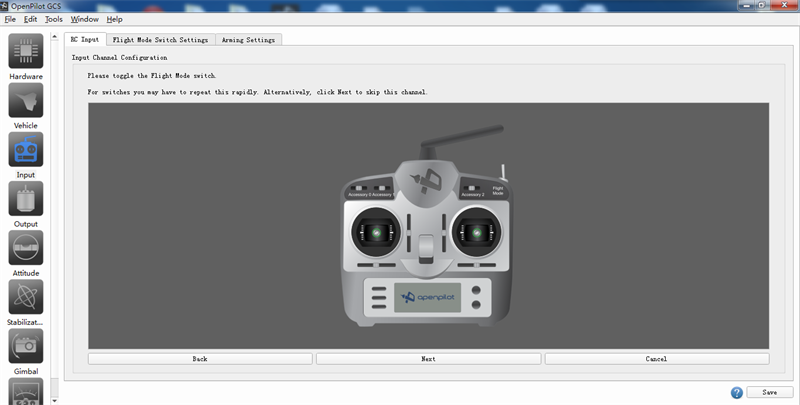
Next,飞行模式校准,这里由于笔者使用的是富斯T6的遥控,没有对应的通道切换开关,但是富斯T6的VRA旋钮开关与之对应,可通过旋钮开关进行配置。Next还有关于Accessory0、Accessory1、Accessory2的配置,没有对应开关选择点击next直接跳过。
各项对应配置完成之后,操作界面将会提示将各通道开关归中。笔者遥控没有后面对应的遥控通道,在配置中直接跳过,这里选择跳过。
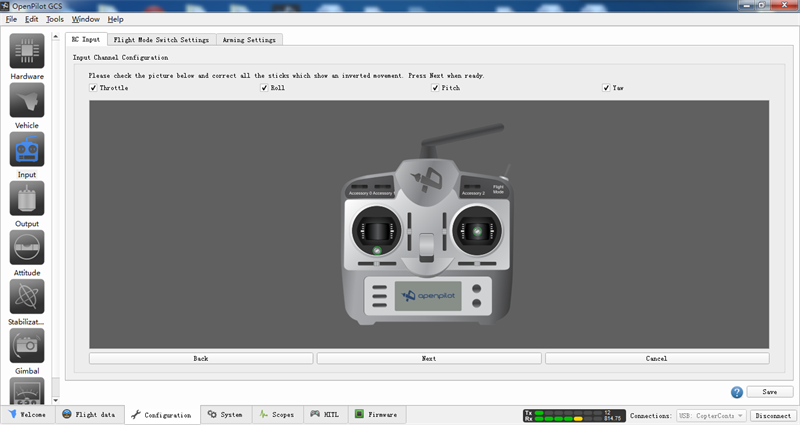
Next,操作提示随意拨动油门、横滚、俯仰、方向摇杆及模式切换开关,观察是否与实际的摇杆动作方向一致。若某个通道方向相反,可以通过勾选其对应通过取反,无需在遥控器上配置,如图所示。
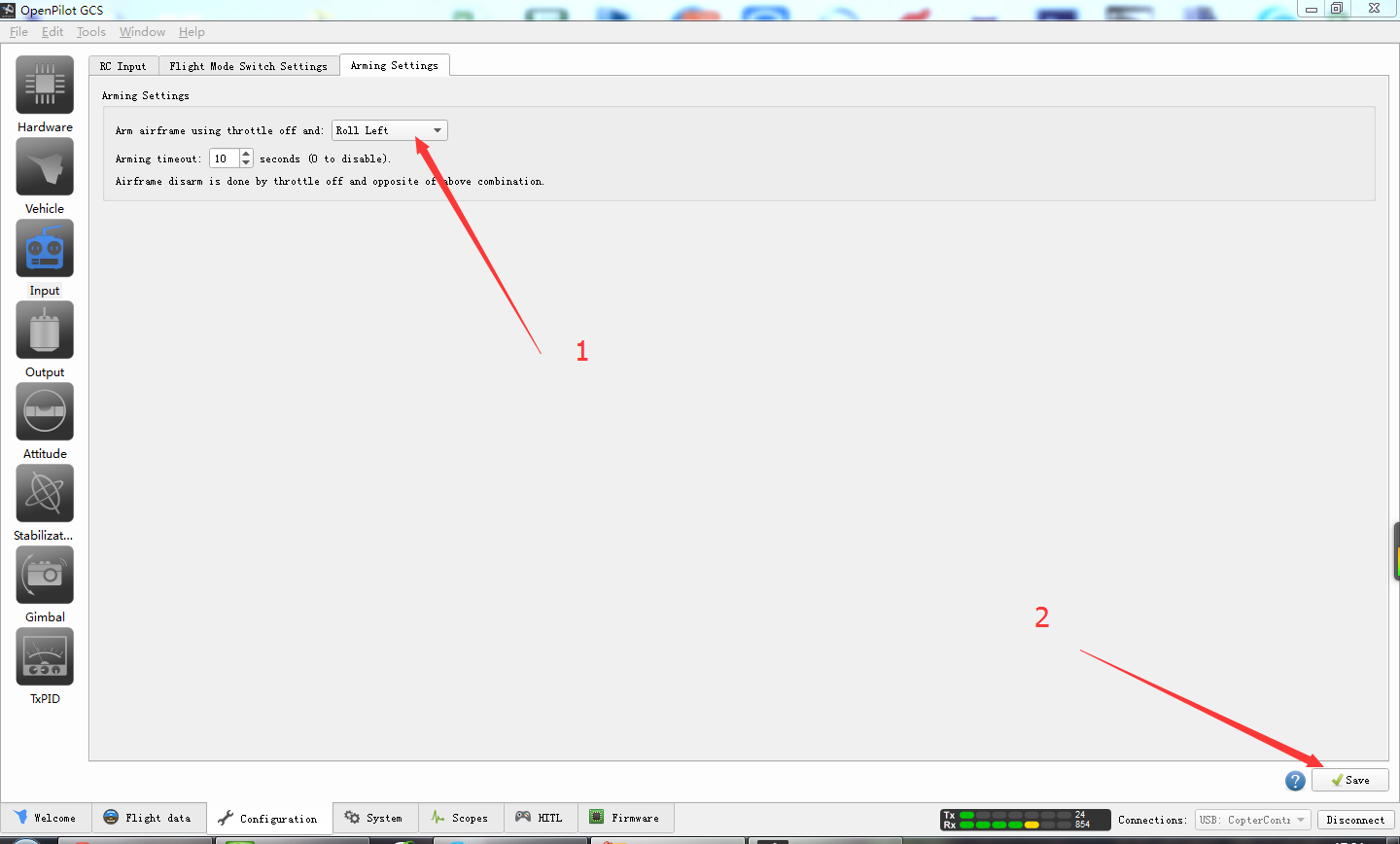
截止以上,遥控的通道操作基本配置完成,点击右下角save保存,next进入遥控的解锁配置操作,CC3D的地面站在配置遥控时默认把油门解锁关闭,解锁方式根据自己的个人习惯而定,提供自定义解锁方式,下面还有一个配置栏是设定无信号接收等待时间自动上锁,默认为30s。一般我们都会配置解锁操作为:油门拉到最低(throttle off),同时右手摇杆向左横打(roll left)。
最后点击save保存设置。
*
最后可以测试遥控器配置是否正确。为了安全首先去掉桨叶。将CC3D上电,并且连上遥控器,可以看到CC3D上蓝色LED慢速闪烁,接收机上红色LED亮起。按照上面设定的解锁操作解锁飞机。如果解锁成功,CC3D上蓝色LED会快速闪烁。轻推油门到一定值,这时候电机就会开始转动。
